教員詳細
Teaching staff detail
研究のテーマ
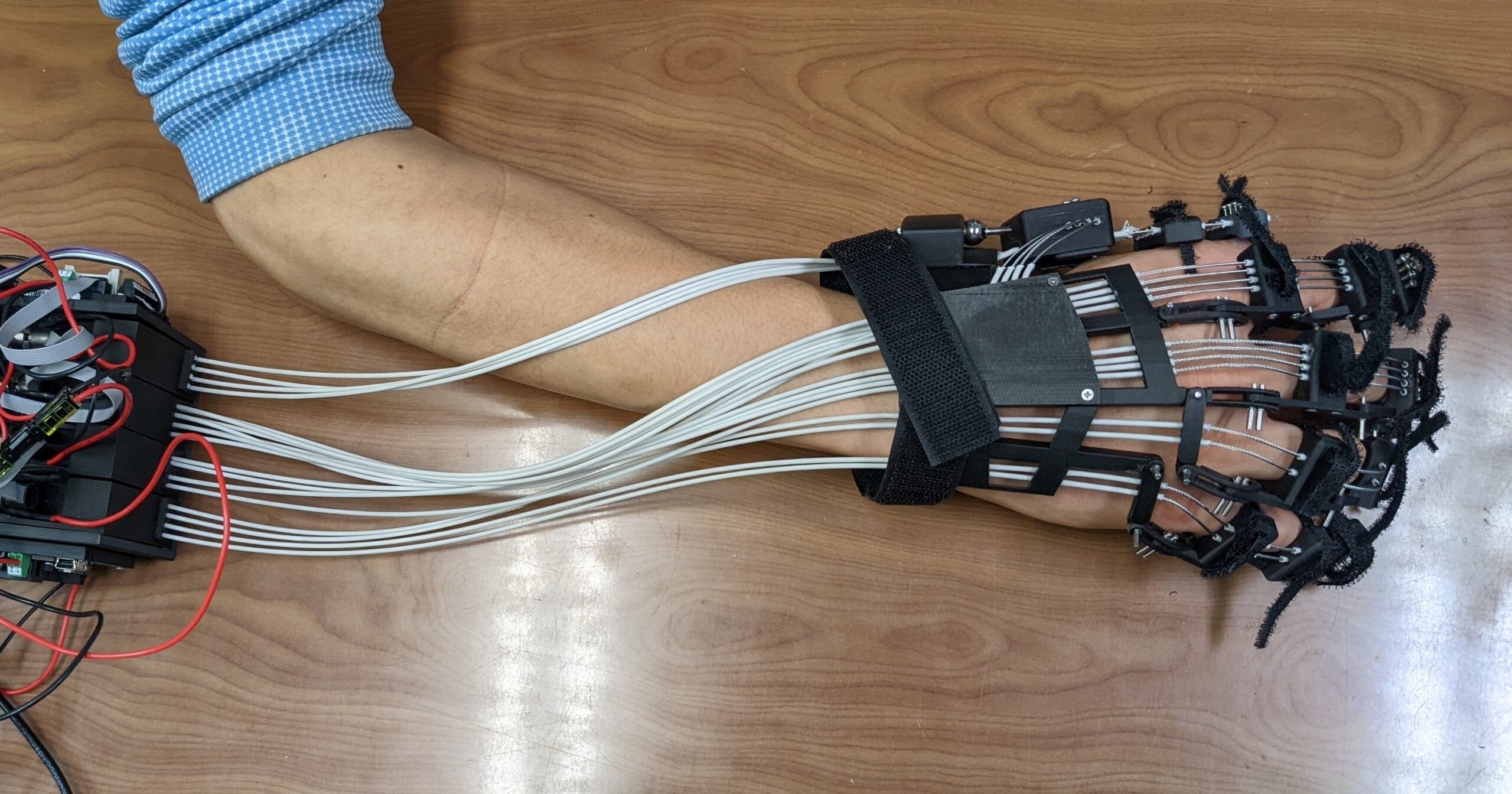
関節の安全性を考慮した良好なパワーアシストシステム
鏡視下手術支援マニピュレータ
ソフトアクチュエータを備えた汎用変形機構の基礎研究
研究内容
生物の構造は高度な機能をもっています.自然界にある限られた材料をうまく利用することで,最大限エネルギー効率を高めたり,自分の体長の何倍もの高さまで跳躍したりと,彼らがもつ構造や能力は非常に興味深いものです.
本研究室では,彼らがもつ構造をただ単に模倣するのではなく,単純化・高度化することで,新しい有益な技術開発を行っています.
例えばヒトの構造です.ヒトがもつ筋肉や腱の作用や配置について深く考察することで,安全な動作支援ができるパワーアシストシステムを設計/開発し,片麻痺患者や高齢者のための運動機能改善を実現する治療方法の確立を目指しています.
他にも,象がもつ運動機能からは,その高度な運動構造を単純化し,実用に耐えうる手術マニピュレータの構成を提案しました. 特に,真核生物であるユーグレナがもつ表皮構造に着目しており,その高度な変形能力をあらゆる移動形態に適用する技術と,その駆動原理を応用する研究やその動力源となる熱交換型人工筋肉(ソフトアクチュエータ)の高性能化に関する技術開発に力を入れています.