教員詳細
Teaching staff detail
研究のテーマ
確率的ロボティクス・機械学習
スモールモビリティによるラストワンマイル
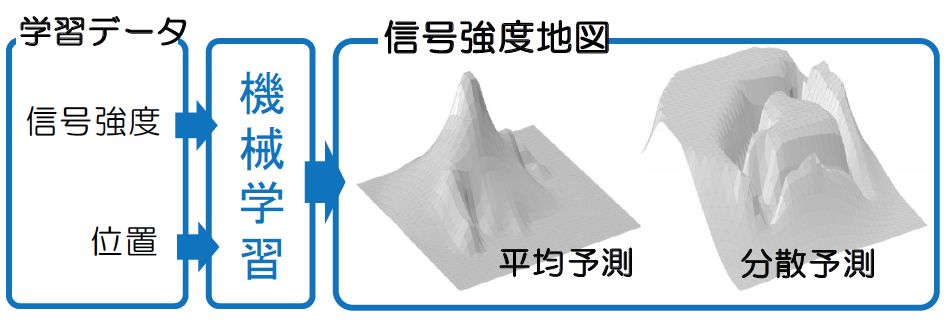
信号強度地図利活用によるロボットナビゲーション
研究内容
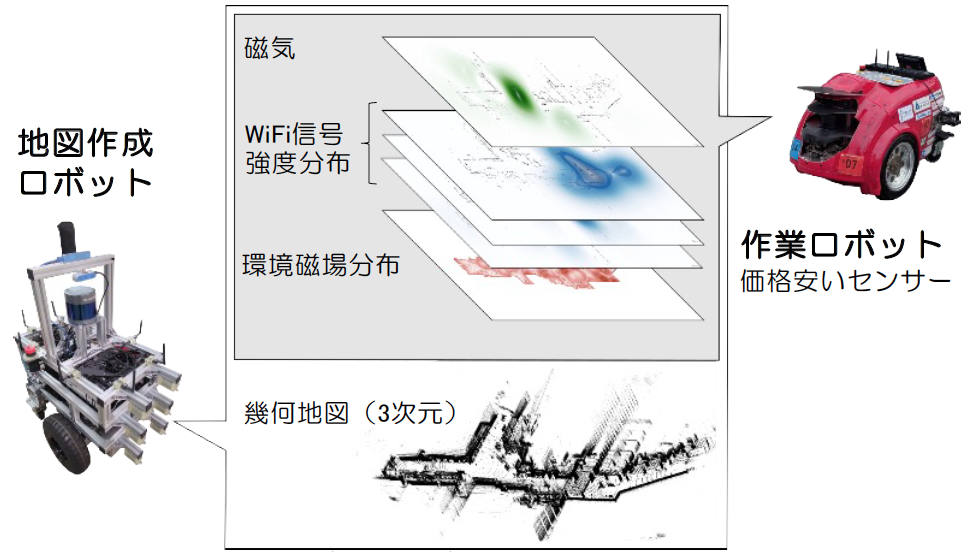
不可視データの多層化地図よるロボットナビゲーションロボットによる無人搬送など、街中での自律移動ロボットの社会実装が加速されていますが、そのためにはロボットのセンサデータと地図との照合(自己位置推定)が必要です。
しかし、人、クルマ、店舗前の看板など、地図データには記載されていない物体の存在で、地図との照合が成立しないことが多々発生しています。そこで、物体の存在に影響されない、目に見えない情報を利用する「不可視情報」の活用を研究しています。
不可視情報とは、一般的なロボットのセンサであるLIDARやカメラなどでは検知できない環境磁気の乱れ(構造物の影響で磁気方位が乱れる)やWi-Fi信号強度変化など場所毎で特徴的に変化する情報を指します。
不可視情報の地図作成ために、機械学習を使用し、一般的な地図と重ね合わせることで、市民生活により地図には表現されない動くモノ、置き場所が変わるモノが多々存在する環境であっても、この情報を使えばロボットの安定した自律移動が実現できます。